1. Stan & De Symbolica
Stan kan niet meer in de Symbolica :(
Maak van jouw XRP een nieuwe Symbolica kar.
 Jij gaat met de XRP-robot een nieuwe slimme Symbolica kar maken voor Stan.
Jij gaat met de XRP-robot een nieuwe slimme Symbolica kar maken voor Stan.
Deel 1 – Onderzoek
Voordat je gaat programmeren, doe je eerst onderzoek om het gedrag te begrijpen.
Benodigdheden
XRP robot
Opdracht
Hoe werkt een kar van de Symbolica?
Welke bewegingen maakt het?
Hoe verandert het van richting?
Onderzoek de XRP welke sensoren zitten erop en wat doen ze?
Kunnen we de bewegingen van de Symbolica kar nabootsen?
Deel 2 – De XRP laten rijden
Nu ga je de XRP programmeren en wat je onderzocht hebt laten werken.
Stappen
Zet de XRP aan.
Verbind hem met de computer.
Open de XRP Code Editor -> https://xrpcode.wpi.edu
Kies voor de Blocks-omgeving.
Maak een nieuw programma en kies voor Blocky.
Zorg dat de bluetooth op je laptop aan staat!
Opdracht
Bouw het volgende programma:
Laat de robot 20 cm vooruit rijden met de volgende snelheid: effort op 0.5

De volgende waardes die je voor snelheid in het blok bij 'effort' kan gebruiken zijn:
Snelheidswaarde | Actie wiel |
|---|---|
1 | Wiel draait vooruit bij 100% inspanning |
0.5 | Wiel draait vooruit bij 50% inspanning |
0 | Wiel stopt met draaien |
-0.5 | Wiel draait achteruit bij 50% inspanning |
-1 | Wiel draait achteruit bij 100% inspanning |
Testen
Zet de XRP op de grond.
Start het programma door op RUN te drukken rechtsboven in het programma. Als het moet stoppen gebruik je dezelfde knop.
Lukt het verbinden niet? ververs dan de website!
Let op:
Blijft hij rijden?
Rijdt hij een bepaalde afstand?
Stop hij?
Deel 3 – De robot laten stoppen voor een muur
Nu ga je het programma verder uitbreiden.
Opdracht
Bouw het volgende programma en volg het filmpje:
Maak een oneindige loop: 'Repeat While True'
Laat beide motoren vooruit draaien op de volgende snelheid: effort 0.5
Maak een blok “Repeat While” met de voorwaarde: zolang de afstand kleiner is dan 20 cm
Na de herhaling laat je de robot stoppen.
Testen
Zet de XRP op de grond, in de buurt van een stukje van een muur, doos of kast.
Start het programma.
Let op:
Stop hij op tijd?
Te vroeg of te laat?
Verander de afstandsdrempel (bijv. 20 of 30 cm) en test opnieuw.
Dat doen we in dit blokgedeelte:

Deel 4 – Maak een volledig zelfstandige Symbolica kar
Ik daag je uit om de volgende aanpassingen zelf te zoeken en te bedenken. Het vorige programma kan je grotendeels hergebruiken.
De robot moet het volgende kunnen:
zelf vooruit rijden
stoppen als hij bijna tegen een voorwerp botst
achteruit rijden
wegdraaien
verder zoeken naar een vrije richting
In het programma heb je het volgende:
Een oneindige herhaling (Loop) en hierin zet je:
Motoren vooruit (Effort 0.5 voor links en voor rechts)
Maak een tweede herhaling (loop) met:
De afstand of '= 15 cm' of '< 20 cm' (Weet jij het verschil in de werking?)Wacht 0,05 sec
Stop de motoren
Achteruit rijden:
Motoren op 30 cm met effort -0.5Wacht 0,3 sec
Draaien:
Kies een draaihoek, bijv. 90°
Of gebruik een “willekeurig getal” tussen 90° en 180°
Testomgeving
Zet de XRP op de grond, in de buurt van een stukje van een muur, doos of kast.
Laat je robot 1–2 minuten rijden.
Observeer
Komt hij vast te zitten?
Welke hoek werkt beter?
Heeft hij een goede snelheid?
TIP: Mocht de aanpassing niet lukken, dan heb je hieronder het voorbeeldprogramma: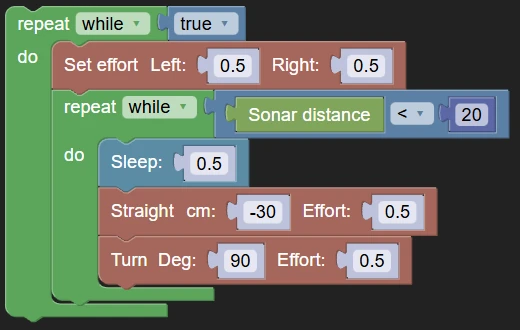
Deel 5 – Verbeter je robot
Kies een verbetering waarop je de robot gaat aanpassen. Bijvoorbeeld:
de robot iets langzamer maken
eerder of later laten stoppen
grotere of kleinere draaihoek
korte extra pauze na de draai
random hoek toevoegen
Pas je programma aan en test opnieuw.
Reflectie
Beantwoord de volgende:
Wat doet jullie robotstofzuiger goed?
Wat kan beter?
Wat heb jij geleerd over “regels” en “sensoren”?
Goed gedaan, het is je gelukt!
Bas is enorm blij dat je een nieuwe robotstofzuiger voor hem hebt gefixt!